Sharded Context Parallelism:极致挖掘 CP 潜力
1. 背景与挑战
1.1 Context Parallelism 的背景
上下文并行(Context Parallelism, CP)已成为扩展长上下文(Long Context)及稀疏注意力(Sparse Attention)模型推理的关键技术。相较于传统的张量并行(TP),CP 具备显著优势(参考 MLSys 2025):
- 低延迟:通过序列维度的并行计算显著降低首字延迟(TTFT)。
- 低通信:节点间通信量远低于 TP,适合跨节点扩展。
- 分布式 KV Cache:KV 缓存容量随设备数线性扩展,有效支撑超长序列。
1.2 现有 CP+TP 架构的瓶颈
然而,当前的 CP 主流实现(如 RFC #22693)通常采用 CP+TP 混合架构。在处理 DeepSeek-V3/V3.2 等稀疏模型时,这种架构暴露出了三大核心局限:
(1) 显存瓶颈:权重冗余存储
在 CP 组内,尽管序列被切分,但每个 Rank 仍需持有完整的权重副本(或 TP 分片)。
- 后果:总显存占用随 CP Rank 数线性增长,严重限制了 CP 在细粒度(如单卡单 Rank)场景下的扩展能力。
(2) 计算瓶颈:稀疏逻辑冗余
对于 DeepSeek DSA 等稀疏模型,Indexer 模块(负责动态选择活跃 Token)由于仅包含单次矩阵乘 + top-k,无法通过 Megatron 式 TP 并行化。
- 后果:TP 组内每张卡都会在相同的本地序列分片上独立运行完整的 Indexer 逻辑,产生大量重复计算,冗余量随 TP 规模线性增加。
(3) 存储瓶颈:KV Cache 去重不彻底
虽然 PCP/DCP 实现了 CP 间的 KV Cache 去重,但在 Rank 内部的 TP 设备组之间,KV Cache 仍然是完全复制的。
2. 核心方案:Sharded Context Parallelism
为了突破上述限制,我们提出了 Sharded Context Parallelism(分片上下文并行)。该方案支持单 GPU 粒度的 CP,通过极致的软硬协同设计,实现了显存、计算与通信的三重优化。
2.1 核心创新
- Shard Linear 机制:借鉴 FSDP 思想,按需加载权重,消除权重的冗余显存占用。
- 消除冗余计算:每张卡仅计算其负责的序列片段(SeqLen),Indexer 等无法 TP 并行的模块不再在 TP 组内重复计算。
- 通信完全掩盖:通过深度流水线优化,将 Attention 阶段的通信隐藏在计算之下,等效通信开销为零。
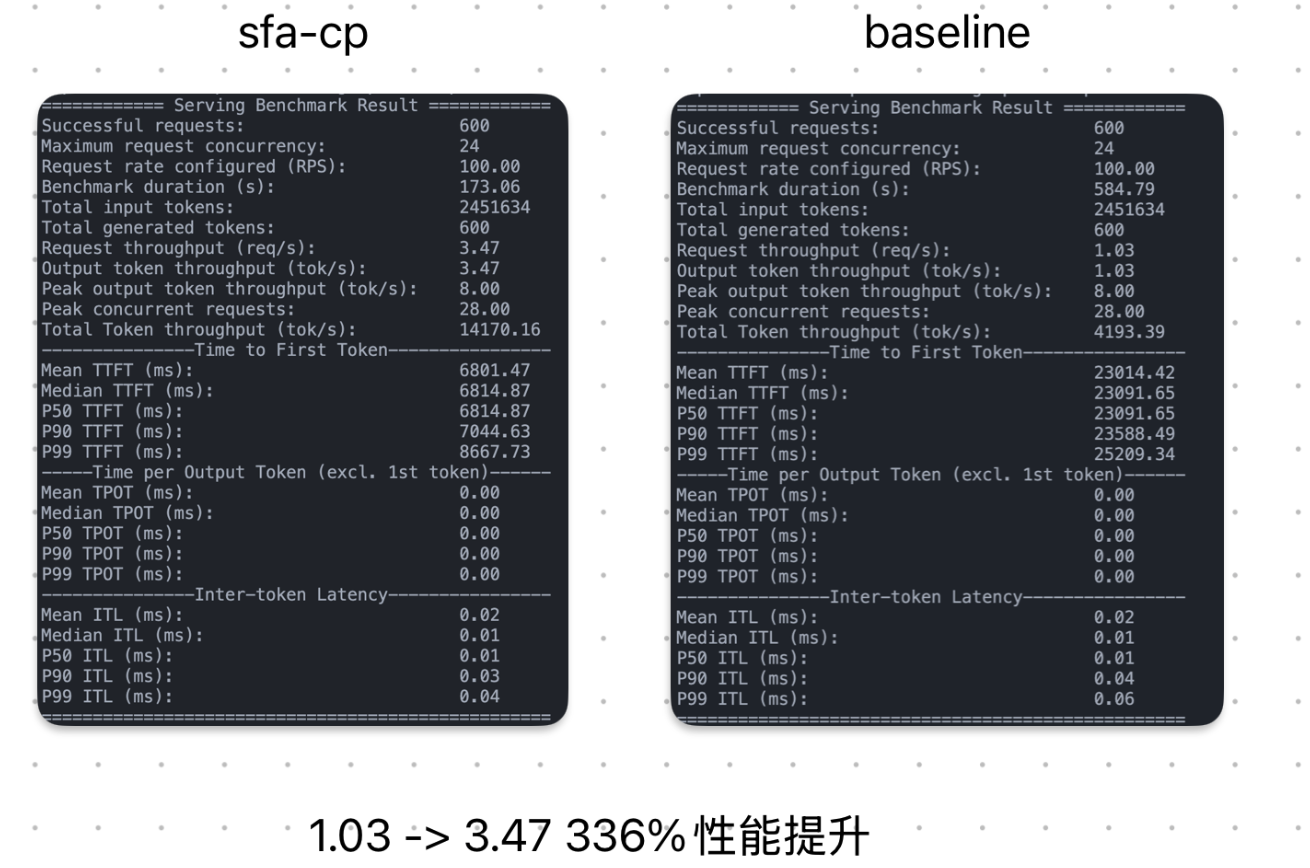
2.2 实验成果
我们在昇腾 910C NPU 的 vllm-ascend 框架中实现了该方案。
- 吞吐提升:在 DeepSeek-v3.2 上获得 336% 的吞吐量提升。
- 长文性能:在 128K 上下文场景下,性能提升高达 500%。
- 开源贡献:vllm-project/vllm-ascend#4702
3. Sharded CP for DeepSeek V3.2
3.1 整体设计架构
DeepSeek V3.2 的 Sharded CP 架构设计如下图所示:
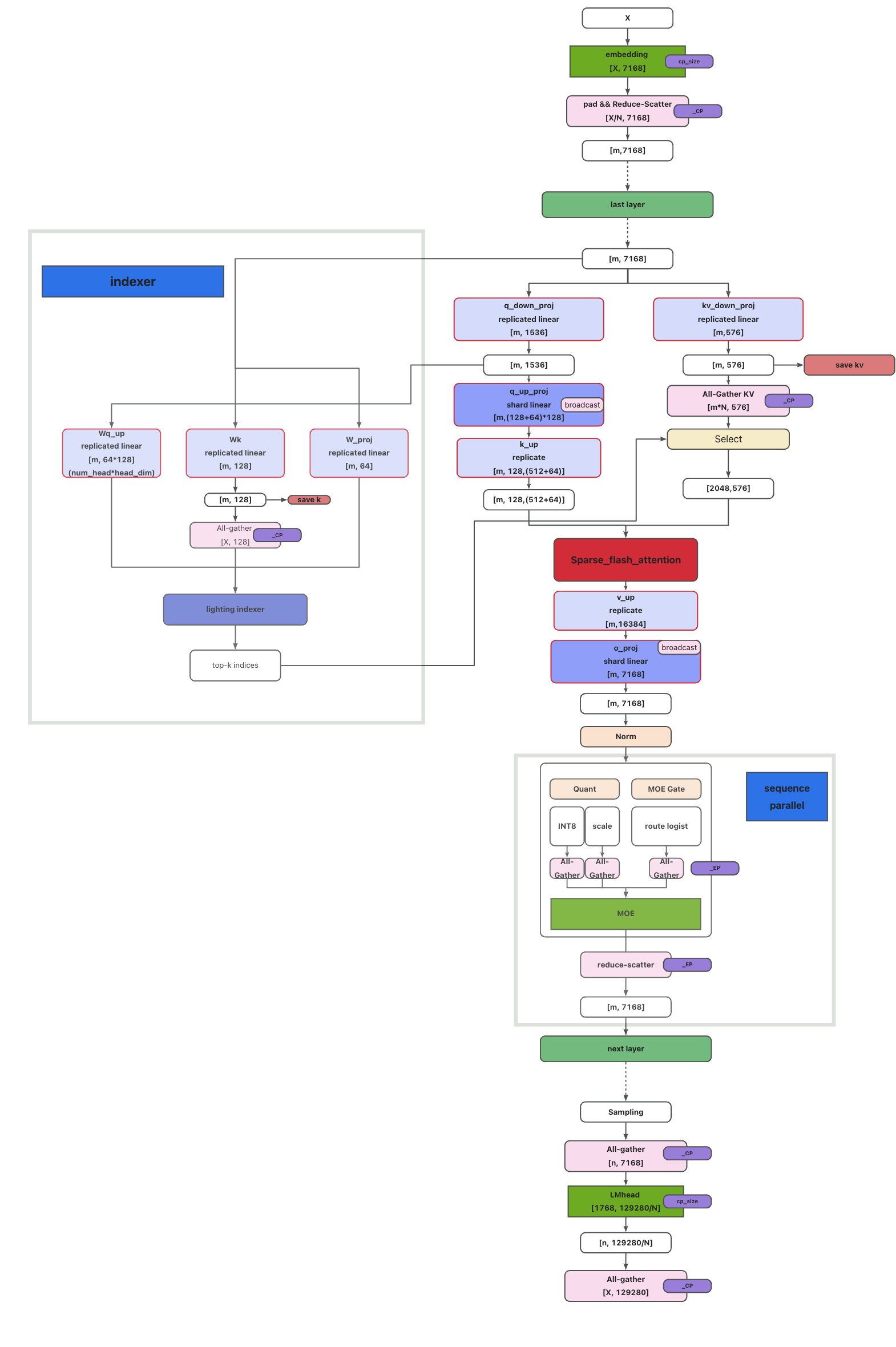
通信消除策略
由于 Attention 权重通常是全量或 TP 冗余存储,我们采取了以下通信消除策略:
- 消除 Output All-Reduce:方案摒弃了 TP row-parallel 的
o_proj(改由 Shard Linear 提供完整权重),自然无需o_proj后的 All-Reduce;每张卡仅输出其负责的序列片段的结果。 - KV Cache 聚合与掩盖:
- 计算 Attention 需要完整的 KV。我们将主模型的 KV Cache、RoPE 以及 Indexer 模块的 K Cache 进行横向拼接。
- 发起一次 All-Gather 操作,将其与计算密集型的
q_up_proj并行执行,实现通信完全被计算掩盖。 - 显存优化:KV Cache 按层通信,用完即存入 Block 或释放,峰值显存占用被限制在单层 KV 的规模。
MoE 部分优化
对 MoE 模块同样应用序列并行(SP)。Attention 结束后,每张卡持有部分 Token 的完整结果。在进入 MoE 之前的 Quant 及 Route Logits 计算后,对结果进行 All-Gather,该过程的通信同样被计算完全掩盖。
3.2 Shard Linear:权重的极致分片
针对占用 MLA 大部分显存的 Q_proj 和 O_proj,我们引入了 Shard Linear 特性。
设计理念
受 FSDP 启发,Shard Linear 改变了权重的生命周期管理:静态时分片存储,计算前动态聚合出完整权重完成矩阵乘,计算后立即释放。
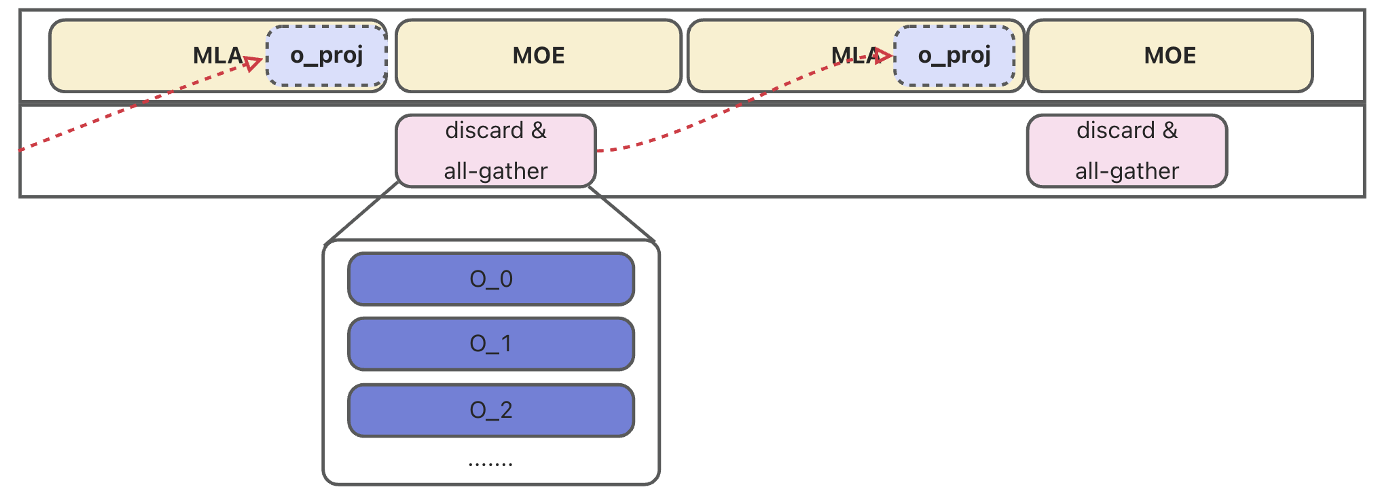
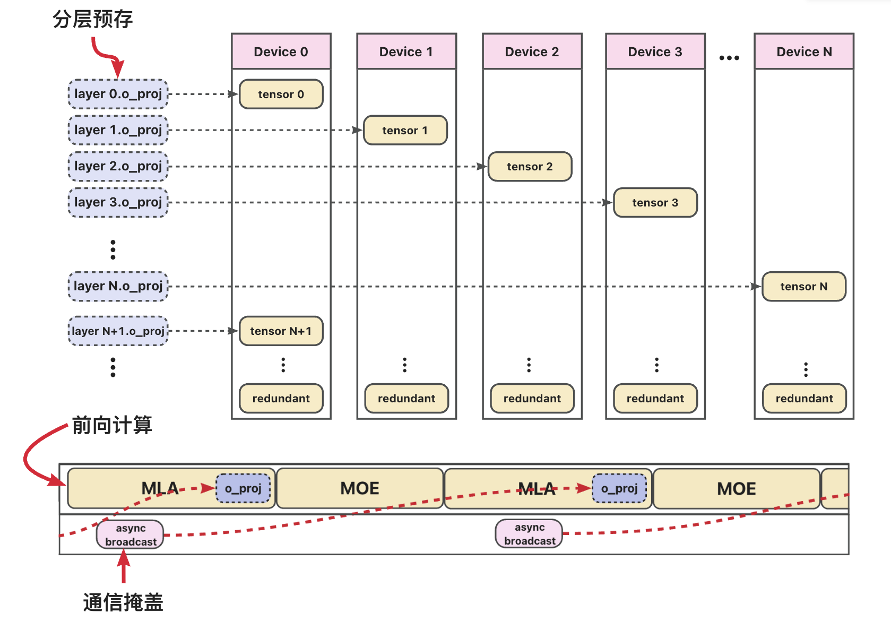
针对 NPU 的 Layer Sharding + Broadcast 方案
FSDP 的原生做法是层内切分(每卡持有每层权重的一部分),通过 All-Gather 在首维拼接。但昇腾 NPU 存在私有权重格式(NZ 格式)及量化属性(Quant Scale 等),按首维 All-Gather 会破坏这些格式与元数据。因此我们放弃层内切分,改用层间 Layer Sharding + Broadcast 的方案:
- 层级分片(Layer Sharding):将各层权重按
Layer ID % Device Count策略完整地分配到不同设备,每层权重只由一张卡持有,不做层内再切分。 - 启动预热:每张卡额外冗余缓存前 $K$ 层的完整权重,确保首 token 推理无延迟启动。
- 异步预取(Asynchronous Prefetch):
- 在 SP 第一阶段 All-Gather 完成后(进入 Attention 前),定位 $L+K$ 层权重所在的源设备。
- 源设备发起 Broadcast,将完整权重(连同 NZ/量化元数据)一次性分发至所有卡,格式天然保留。
- 由于 Prefill 阶段
q_up_proj和FlashAttention耗时较长,Broadcast 通信可被完全掩盖。
- 及时释放:前向计算完成后,立即释放该层权重。
此特性已合入 vllm-ascend 主分支:PR #2931
4. 性能提升分析⭐️
这个性能提升幅度超出了预期 —— Prefill 阶段的单项优化通常能拿到 10% 左右就已经算相当不错的关键特性了。下面针对性能来源做详细拆解。
性能提升benchmark图 && gsm8k精度图:
算子性能分析:
首先看性能差异比较大的算子:
1. SparseFlashAttention
profile:

kernel_details:
| 方案 | Device_id | Model ID | Task ID | Stream ID | Name | Type | OP State | Accelerator Core | Start Time(us) | Duration(us) | Wait Time(us) | Block Dim | Mix Block Dim | HF32 Eligible | Input Shapes | Input Data Types | Input Formats | Output Shapes | Output Data Types | Output Formats | Context ID | aicore_time(us) | aic_total_cycles | aic_mac_time(us) | aic_mac_ratio | aic_scalar_time(us) | aic_scalar_ratio | aic_mte1_time(us) | aic_mte1_ratio | aic_mte2_time(us) | aic_mte2_ratio | aic_fixpipe_time(us) | aic_fixpipe_ratio | aic_icache_miss_rate | aiv_time(us) | aiv_total_cycles | aiv_vec_time(us) | aiv_vec_ratio | aiv_scalar_time(us) | aiv_scalar_ratio | aiv_mte2_time(us) | aiv_mte2_ratio | aiv_mte3_time(us) | aiv_mte3_ratio | aiv_icache_miss_rate | cube_utilization(%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| cp | 0 | 4294967295 | 58111 | 2 | SparseFlashAttention | SparseFlashAttention | dynamic | MIX_AIC | 1764761459549479.309 | 3524.631 | 1.055 | 24 | 48 | NO | “1024,128,512;485,128,1,512;485,128,1,512;1024,1,2048;5,128;5;5;1024,128,64;485,128,1,64” | DT_BF16;DT_BF16;DT_BF16;INT32;INT32;INT32;INT32;DT_BF16;DT_BF16 | ND;ND;ND;ND;ND;ND;ND;ND;ND | “1024,128,512” | DT_BF16 | ND | 0 | 2767.033 | 122856248 | 1270.05 | 0.459 | 1090.331 | 0.394 | 1124.983 | 0.407 | 1901.353 | 0.687 | 1908.977 | 0.69 | 0 | 2769.781 | 245956577 | 802.586 | 0.29 | 2338.385 | 0.844 | 1725.753 | 0.623 | 714.356 | 0.258 | 0 | 75.365 |
| baseline | 0 | 4294967295 | 32713 | 2 | SparseFlashAttention | SparseFlashAttention | dynamic | MIX_AIC | 1764762104173838.715 | 39846.596 | 1.135 | 24 | 48 | NO | “16384,8,512;699,128,1,512;699,128,1,512;16384,1,2048;4,128;4;4;16384,8,64;699,128,1,64” | DT_BF16;DT_BF16;DT_BF16;INT32;INT32;INT32;INT32;DT_BF16;DT_BF16 | ND;ND;ND;ND;ND;ND;ND;ND;ND | “16384,8,512” | DT_BF16 | ND | 0 | 30812.793 | 1368088000 | 5191.721 | 0.168 | 12573.224 | 0.408 | 13614.999 | 0.442 | 24602.17 | 0.798 | 23509.344 | 0.763 | 0 | 30813.542 | 2736242537 | 1104.192 | 0.036 | 28802.779 | 0.935 | 24316.9 | 0.789 | 5973.504 | 0.194 | 0 | 74.235 |
我们来看一下其中的一些关键指标
| 维度 | CP | Baseline | 差异分析 |
|---|---|---|---|
| 执行耗时 (Duration) | 3.52 ms | 39.85 ms | cp 快 11.3 倍 |
| input_shape | [1024, 128, 512]... |
[16384, 8, 512]... |
CP 方案切分 seq,但保留完整的 head;虽维度不同,单卡数据量相同 |
| output_shape | [1024, 128, 512] |
[16384, 8, 512] |
同上(可以推断 SFA 的计算量完全相同) |
| cube_utilization(%) | 75.365% | 74.235% | 利用率相近,说明计算效率相当 |
| aic_mte1_time aic_mte2_time aiv_mte2_time aiv_mte3_time |
1124.98 μs 1901.35 μs 1725.75 μs 714.36 μs |
13614.99 μs 24602.17 μs 24316.9 μs 5973.5 μs |
基本都是 12 倍左右,MTE 是性能差异的主因 |
在华为昇腾 AI 处理器(如 Ascend 910)中,MTE 是专门负责数据搬运的硬件单元,与计算单元(AI Core 中的 Cube、Vector 单元)解耦并行工作。CP 方案显著减少了 KV Cache 的访存量,有效缓解了 MTE 的访存瓶颈,使得 SFA 算子中的计算能够更高效地流水执行。
为什么 CP 能减少 kv cache 访存 ?
要理解这一点,关键是看清 Sparse Attention 的访存模式与稠密 MLA 的本质区别。
稠密 MLA 中,所有 Q token 共享同一份完整 KV,内核可以将 KV 一次性、连续地从 HBM 读入片上并被所有 Q token 复用,访存是规整的大块顺序读,MTE 带宽利用率高。
DeepSeek-V3.2 的 SFA 则不同:Indexer 为每个 Q token 独立筛选出 top-2048 个活跃 KV —— 不同 token 命中的 KV 位置不同、不连续、随机分布在完整 KV Cache 中。内核只能按 token 粒度做稀疏、非连续的随机访存:每个 Q token 都要触发一次对其 2048 个 KV 位置的 gather,彼此之间几乎无法复用同一次 HBM 读取。这种访存模式下,MTE 的开销正比于 Q token 的数量,而不是像稠密场景那样与总 KV 大小线性相关。
- Baseline (TP16):TP 切的是 head 而非 seq,每张卡都持有完整 seqlen 的 Q,需要对全部 token做稀疏 gather。更关键的是,MLA 的 latent KV 在 head 维度是共享的,TP 无法连带把 KV 切开 —— 每张卡实际仍在完整的 KV Cache 上做稀疏随机读。最终大量时间耗在 MTE 上,SFA 内核表现为严重的访存瓶颈与流水线停顿。
- CP16:序列沿 CP 维度被切成 16 份,每张卡只持有 1/CP 的 Q token,稀疏 gather 的次数也只有 baseline 的 1/CP。MTE 总工作量按序列切分比例线性下降,内核从访存 bound 回归到更健康的计算-访存平衡,这正是 SFA 算子提速 11× 的根本原因。
理论上 baseline 单卡 KV 读取量应达 CP 方案的 16 倍,但实测 MTE 时间差距约 11~12 倍(见前文 aic_mte / aiv_mte 指标)。推测原因:不同 Q token 的 top-k 结果存在位置重叠,底层 cache 能命中一部分重复访问,摊薄了 baseline 的访存开销。
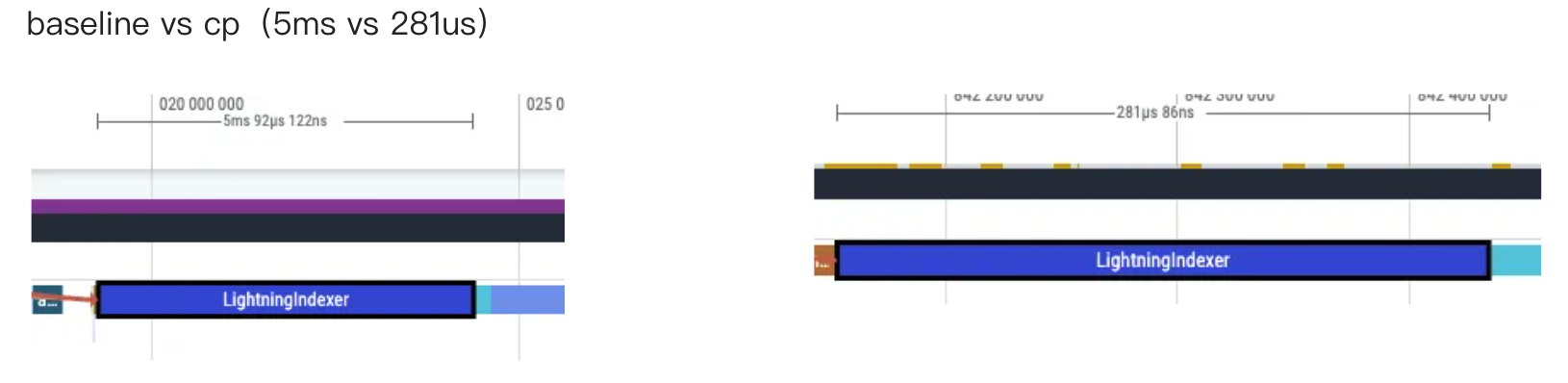
2. LightningIndexer 的计算
profile:
kernel_details:
| 方案 | Device_id | Model ID | Task ID | Stream ID | Name | Type | OP State | Accelerator Core | Start Time(us) | Duration(us) | Wait Time(us) | Block Dim | Mix Block Dim | HF32 Eligible | Input Shapes | Input Data Types | Input Formats | Output Shapes | Output Data Types | Output Formats | Context ID | aicore_time(us) | aic_total_cycles | aic_mac_time(us) | aic_mac_ratio | aic_scalar_time(us) | aic_scalar_ratio | aic_mte1_time(us) | aic_mte1_ratio | aic_mte2_time(us) | aic_mte2_ratio | aic_fixpipe_time(us) | aic_fixpipe_ratio | aic_icache_miss_rate | aiv_time(us) | aiv_total_cycles | aiv_vec_time(us) | aiv_vec_ratio | aiv_scalar_time(us) | aiv_scalar_ratio | aiv_mte2_time(us) | aiv_mte2_ratio | aiv_mte3_time(us) | aiv_mte3_ratio | aiv_icache_miss_rate | cube_utilization(%) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| cp | 0 | 4294967295 | 58109 | 2 | LightningIndexer | LightningIndexer | dynamic | MIX_AIC | 1764761459548934.118 | 282.446 | 0.789 | 24 | 48 | NO | “1024,64,128;485,128,1,128;1024,64;5;5;5,128” | DT_BF16;DT_BF16;DT_BF16;INT32;INT32;INT32 | ND;ND;ND;ND;ND;ND | “1024,1,2048” | INT32 | ND | 0 | 261.516 | 11611319 | 84.575 | 0.323 | 99.695 | 0.381 | 70.886 | 0.271 | 29.714 | 0.114 | 139.095 | 0.532 | 0.005 | 278.619 | 24741398 | 213.992 | 0.768 | 74.65 | 0.268 | 96.997 | 0.348 | 6.258 | 0.022 | 0.005 | 88.886 |
| baseline | 0 | 4294967295 | 32711 | 2 | LightningIndexer | LightningIndexer | dynamic | MIX_AIC | 1764762104168502.129 | 5092.241 | 2.098 | 24 | 48 | NO | “16384,64,128;699,128,1,128;16384,64;4;4;4,128” | DT_BF16;DT_BF16;DT_BF16;INT32;INT32;INT32 | ND;ND;ND;ND;ND;ND | “16384,1,2048” | INT32 | ND | 0 | 4554.882 | 202236777 | 1736.127 | 0.381 | 1781.882 | 0.391 | 1451.462 | 0.319 | 549.574 | 0.121 | 2590.513 | 0.569 | 0 | 5085.976 | 451634633 | 4250.194 | 0.836 | 1419.064 | 0.279 | 1844.032 | 0.363 | 65.617 | 0.013 | 0 | 85.87 |
**关键指标: **
| 维度 | CP | baseline | 差异分析 |
|---|---|---|---|
| 执行耗时 (Duration) | 282.4us | 5092.2us | cp 比 baseline 快 18 倍 |
| input_shape | [1024,64,128]… | [16384,64,128]…. | 关键:seq 维度相差 16 倍 |
| output_shape | [1024, 1, 2048] | [16384, 1, 2048] | 同上(可以推断 CP 方案下 Indexer 的计算量远小于 baseline) |
| aic_mte | …. | …. | cp 远小于 baseline(20x) |
| aiv_mte | …. | …. | cp 远小于 baseline(18x) |
LightningIndexer 模块的核心收益来自于消除冗余计算。
为什么 baseline 中 Indexer 模块的三个矩阵无法在 TP 维度切分?
Megatron 式 TP 依赖 column-parallel + row-parallel 的成对组合,通过两次矩阵乘在内部消化掉激活的切分。而 LightningIndexer 只包含一次矩阵乘,其输出激活直接送入 top-k —— top-k 需要看到完整激活才能做全局选择。在不引入额外 All-Gather 通信的前提下,这里无法做 TP 切分。
5. 总结与展望
Sharded Context Parallelism 是一次将 CP 理念推向极致的尝试:
- ✅ 打破粒度限制:实现单卡级 CP,最大化硬件利用率。
- ✅ 打破显存限制:Shard Linear 消除权重冗余。
- ✅ 打破计算限制:彻底消除稀疏模型的 Indexer 冗余。
- ✅ 打破通信限制:通过全流程计算-通信掩盖,Attention 阶段的通信开销等效为零。
实测效果:DeepSeek-v3.2 吞吐量提升 336%,验证了该架构在处理复杂稀疏大模型时的卓越效能。
未来计划:
- 将 Sharded CP 推广至更多 Transformer 架构模型。